SENSYS MX3D UW
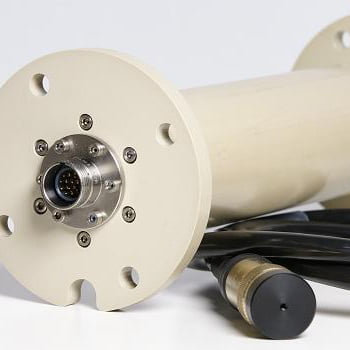
The submersible measurement system is equipped with high-resolution three axis Fluxgate sensors FGM3D UW, sampled with up to of 2,000 Hz. The sensor data is digitized with 24 Bit by the MXLAN box. This unit can be connected to a DGPS and allows for a data output via TCP/IP.
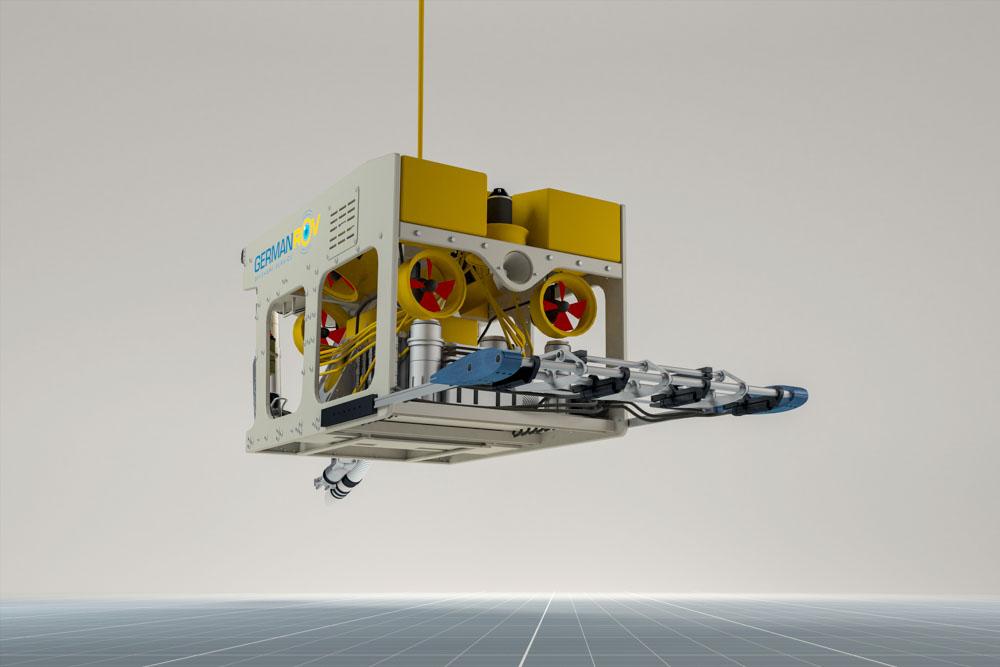
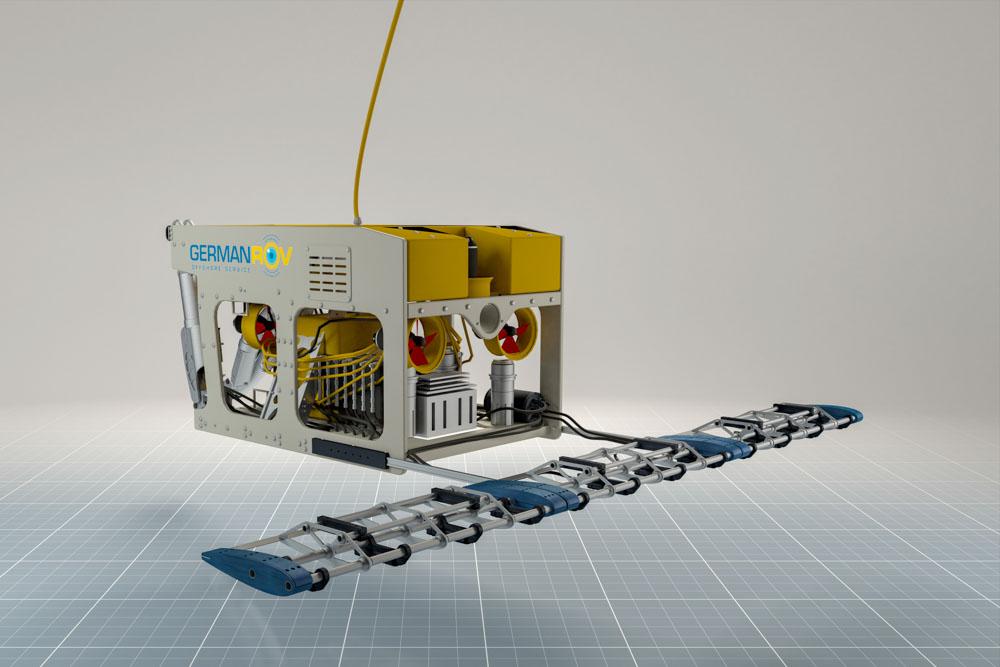
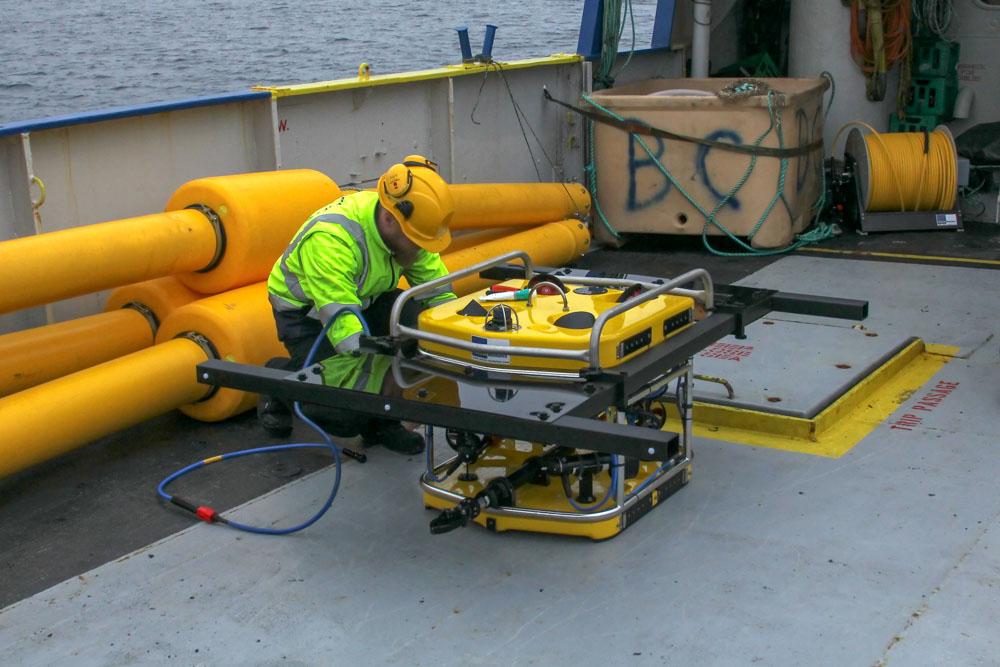
Having a scalable structure, the system can be easily integrated in existing infrastructures such as vessels, ROVs or ROTVs due to its default data transfer protocol. Thus is can be used with various software solutions such as QINSy, NaviScan and Hypack.
The MX3D UW corresponds not only to the demands of precise data acquisition in underwater applications, but is also highly compatible and can be easily integrated into existing systems.
This ain’t be enough information? Get in contact with us! Find us on LinkedIn | YouTube | Facebook | Instagram