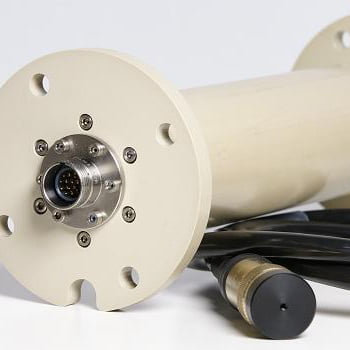
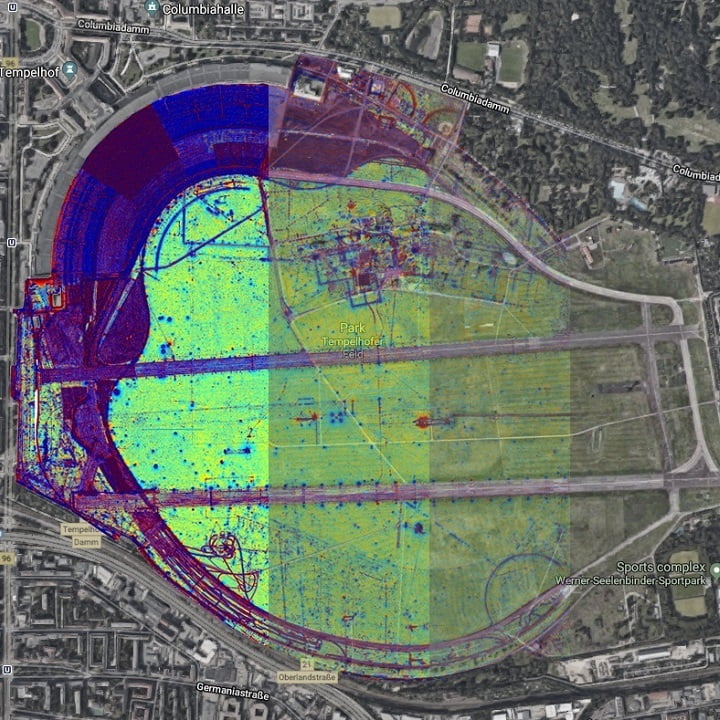
The FGM3D UW is a compact three-axis Fluxgate magnetometer for maritime applications. It can be used in shallow waters, as well as for offshore and deep sea applications. As part of of the MX3D UW magnetometer system and the SEARACK ROV sensor frame the sensors are used for efficient and low logistics ROV based surveys. Those ROVS surveys include detection of buried UXO in seabed, but also inspection of offshore infrastructure such as foundations, pipelines or cable lines.
The FGM3D UW is being used for example for stationary application as in naval degaussing systems, but also for long-term measurements of the Earth’s magnetic field.
This ain’t be enough information? Get in contact with us! Find us on LinkedIn | YouTube | Facebook | Instagram
| Technical Data MX3D UW | |
|---|---|
| Sensors | FGM3D/100 UW II |
| Measurement Range | ±100,000 nT (others available upon request) |
| Noise | <15 pTrms/√ Hz @ f = 1 Hz |
| Bandwidth | 2,000 Hz standard, 4,000 Hz upon request |
| Length | 263 mm |
| Diameter | 45 mm |
| Power Supply | ±12….±15 V |
| Current Consumption | ± 26 mA |
| Cable Length to MX3D UW | 0.5 to 100 m |
| Weight (Air/Water/Salt Water) | 444 g/188 g/182 g |
| Data Acquisition | MX3D UW DAU |
| Number of Sensors | 1 to 5 units per digitizer, cascadable |
| Number AUX Sensors | 2 (serial, GPS, altimeter, AHRS, etc.) |
| Sampling Range | 200 Hz to 10,000 Hz (others available upon request) |
| Resolution (ADC) | 24 bit |
| Input | 15x analogue channel, 1x RS232 |
| Output | 10/100 mBits/s, full duplex |
| Start-up current | 2.5 A (restricted) |
| Power Supply | 10…32 VDC |
| Current consumption (at 200 Hz sampling rate) | max. 10 W (including 5 sensors) |
| Ethernet Cable Length | max. 100 m (min. Cat6), extendible via DSL modem |
| Bandwidth requirements | approx. 750 kbit/s (5 sensors, 1,000 Hz sampling rate) |
| Connectors | Sensors: Subconn MCBH8F, Voltage/LAN: DBH13M |
| Dimensions | Diameter: 98 mm, Length (w/o connector): 324 mm, Volume: 1,694 Liters |
| Weight (Air/Water/Salt Water) | 2,949.4 g /1,250 g/1,210 g |
| Options of Integrations | |
| Sensor Position towards Carrier System | Variable, minimum distance depending on carrier system |
| Integration of Sensors | Variable adjustment |
| Distance of Sensors | Variable, typical ≤ 0.5 m |